In the realm of robotics, the ability to navigate and manipulate objects in a variety of environments represents one of the greatest challenges. Unlike humans, who can reach for a book on a cluttered shelf with ease, robots often struggle to perform similarly complex tasks. This article explores recent advances in motion planning, particularly through the lens of a breakthrough developed by Carnegie Mellon University’s Robotics Institute. This technique, known as Neural Motion Planning (NMP), leverages artificial intelligence to enhance robots’ agility in unstructured and unfamiliar settings.
The Challenge of Motion Planning in Robotics
For years, robotics researchers have faced significant hurdles when it comes to motion planning—the process by which robots learn to move from one point to another while avoiding obstacles. Traditional motion planning methods often rely heavily on pre-defined algorithms that are not only time-consuming but also limited by their inability to adapt to new or dynamic environments. These systems require extensive and computationally intensive collision checks, which can fluctuate in the complexity of the environments being navigated. As Murtaza Dalal, a doctoral student at the Robotics Institute, highlights, such traditional approaches fall short in unstructured areas where the unknown prevails.
Humans, on the other hand, utilize their cognitive abilities to seamlessly navigate obstacles based on their past experiences and practiced skills. This stark contrast in the adaptability of human versus robotic motion planning has motivated researchers to seek innovative solutions.
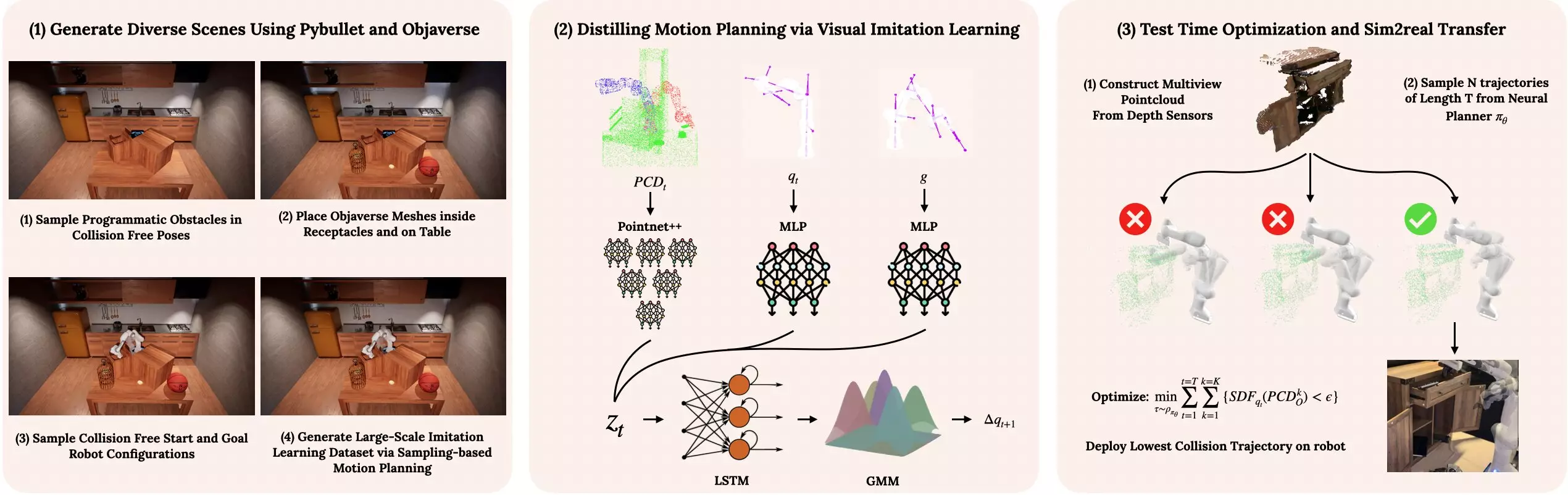
Neural Motion Planning represents a significant advancement aimed at addressing the limitations of conventional approaches. Drawing inspiration from the human learning process, NMP utilizes a data-driven framework where a single AI model is trained to react dynamically within various household environments. Instead of being limited to task-specific coding, this model can process complex situations—such as maneuvering around a pet or reaching into crowded cabinets. The essence of NMP lies in its ability to learn from vast amounts of simulated data to generate versatile responses in real-world situations.
Carnegie Mellon’s researchers subjected the NMP system to millions of diverse simulated environments. By encountering not just common household items but also random and unpredictable objects, the AI model gradually learned to adapt its movements. The process mimics the way humans progress from cautious and deliberate motion to fast and effective actions, refining their skills through practice.
The effectiveness of Neural Motion Planning was notably demonstrated using a robotic arm within laboratory settings. Researchers implemented depth cameras to create a three-dimensional representation of the environment, which allowed the robotic arm to identify both its starting position and a target endpoint for its tasks. NMP expertly directed the arm through various obstacles—including household items like lamps and plants—illumining the model’s ability to navigate efficiently in unpredictable scenarios.
The success of the robotic arm offers not only a glimpse into the potential of NMP but also provides an encouraging forecast for the future of robotics. As Deepak Pathak, an assistant professor at the Robotics Institute, points out, advancements in areas like vision and language have yet to rigorous be matched in robotics. NMP signifies a stepping stone towards achieving similar levels of capability in robotics, enabling robots to operate across a diverse range of real-world contexts.
As we look to the future, Neural Motion Planning may well redefine the landscape of robotics. With its capability to generalize across various environments and perform tasks with agility reminiscent of human movement, NMP establishes a foundation for more intelligent and flexible robotic systems. As the field evolves, the integration of AI-driven approaches will likely pave the way for significant advancements in everyday robotics. It’s an exciting time for researchers and consumers alike as we anticipate a future where robots can intuitively and efficiently navigate our increasingly complex world.